
Modeling and compensation of rate-dependent hysteresis in piezoresistive strain sensors
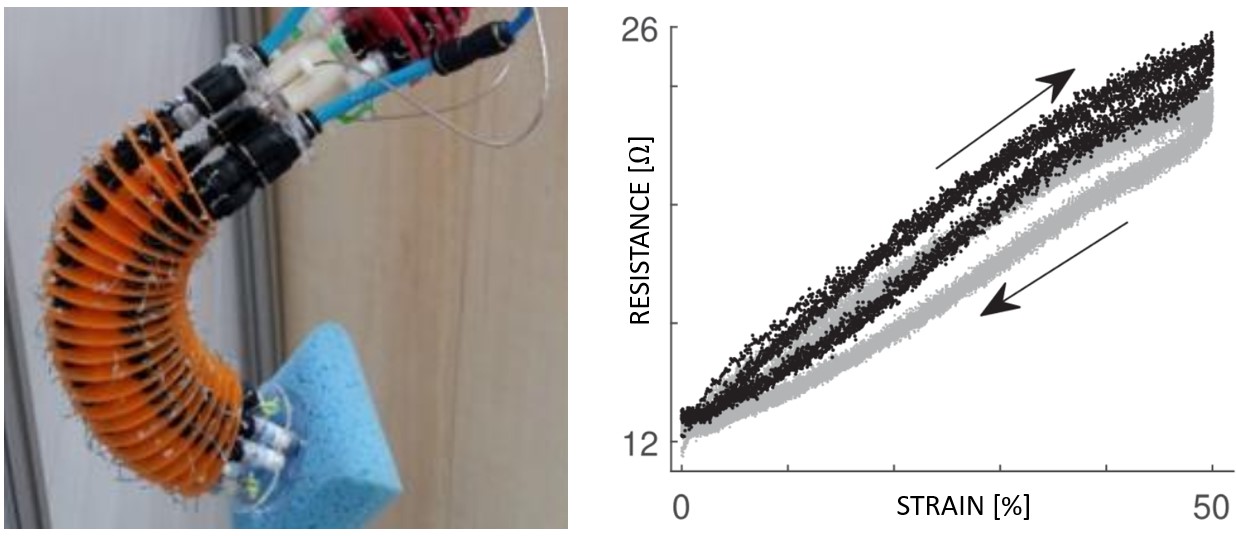
Image taken from here.
Summary
Proprioception is the sense that lets us perceive the location, movement, and action of parts of the body. Thanks to proprioception, e.g., we can drink a glass of water with closed eyes. Human beings can take this sense for granted, but this is not the case for robots, especially if they are soft, thus ensuring safe human-robot interaction.
Research on soft robotics is becoming increasingly important worldwide, but how soft robots can sense their bodies still remains an open question and a challenge, due to their continuously deformable structure, which imposes the use of flexible and light sensors.
Stretchable strain sensors based on smart textiles are good candidates, being noninvasive, flexible, easy to use, and inexpensive. Common devices are piezoresistive strain sensors, whose electrical resistance changes in response to an applied mechanical stretching. The main drawbacks of piezoresistive materials are their remarkable electromechanical hysteresis and nonlinear relaxation dynamics, which must be accurately compensated in order to exploit them as sensors.
Other sensing techniques can be exploited to achieve proprioception, by means of 3D-printed strain sensors or optical sensors.
The aim of our research is to
- develop nonlinear models able to reproduce the rate-dependent hysteresis and relaxation dynamics of smart textiles (Electrolycra) and 3D-printed piezoresistive strain sensors;
- exploit these models to design accurate sensors for soft robotics applications;
- develop the analog/digital electronics to interface with multiple sensors.
Research projects
SOFTNESS: Soft robotic arm with bodily awareness.
Relevant publications
A. Oliveri, M. Maselli, M. Lodi, M. Storace, M. Cianchetti. Model-Based Compensation of Rate-Dependent Hysteresis in a Piezoresistive Strain Sensor. IEEE Transactions on Industrial Electronics. Vol. 66, n. 10, pp. 8205-8213, 2019.
Modeling of saturating power inductors
Summary
Switch-mode power supplies (SMPSs) are widely exploited to interface electrical energy sources to motors and other electrical loads. Inductors are usually the biggest and heaviest components in SMPSs, limiting their overall power density. Then, there is an increasing interest in designing SMPSs with partially saturating inductors, because this significantly reduces their weight and size, thus increasing power density.
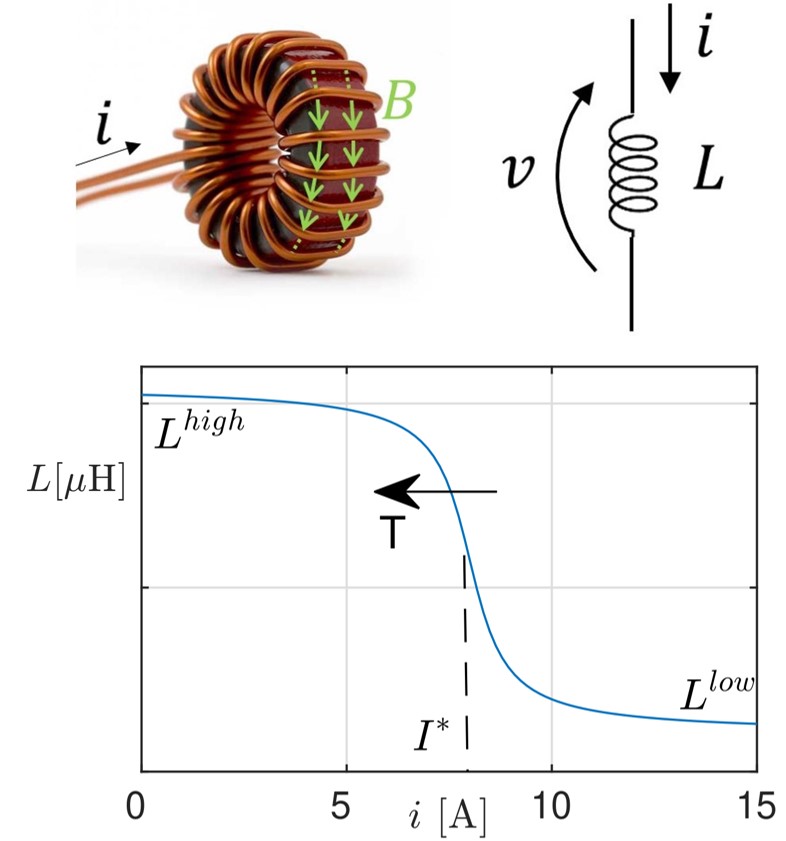
As is well known, a current flowing through the inductor wire induces a magnetic flux across the windings. For sufficiently low currents, the flux can be assumed to be proportional to the current through a constant coefficient (the inductance), which is the main parameter describing the inductor.
However, over a certain current threshold, magnetic core saturation occurs, causing the flux to increase much more slowly. In other words, the inductance decreases as the current increases. In order to exploit smaller inductors working in partial saturation, accurate models of the inductance and power loss are necessary to design, simulate, monitor, and control power converters.
The aim of our research is to
- develop behavioral models based on easy-to-measure quantities, able to accurately reproduce the inductor behavior, in terms of both inductance and power loss, also in the saturation region;
- exploit these models for SMPS design, simulation, monitoring, and control.
Research projects
MAGSAT: Exploiting MAGnetic SATuration to increase power density in switching converters
Relevant publications
A. Ravera, A. Oliveri, M. Lodi, M. Storace. FPGA Implementation of Nonlinear Model Predictive Control for a Boost Converter with a Partially Saturating Inductor. Electronics. Vol. 14, n. 5, pp. 941, 2025.
A. Ravera, A. Oliveri, M. Lodi, C. Beatrice, E. Ferrara, F. Fiorillo, M. Storace. Modeling amorphous-core inductors up to magnetic saturation. IEEE Transactions on Power Electronics. Vol. 40, n. 1, pp. 1536-1576, 2024.
A. Ravera, A. Formentini, M. Lodi, A. Oliveri, M. Passalacqua, M. Storace. Modeling the effect of air-gap length and number of turns on ferrite-core inductors working up to magnetic saturation in a buck converter. IEEE Transactions on Circuits and Systems I: Regular Papers. Vol. 71, n. 12, pp. 5400-5409, 2024.
P. Firpo, A. Ravera, A. Oliveri, M. Lodi, M. Storace. Use of a partially saturating inductor in a boost converter with model predictive control. Electronics. Vol. 12, n. 14, pp. 3013, 2023.
A. Oliveri, M. Lodi, M. Storace, M. Nonlinear models of power inductors: A survey. International Journal of Circuit Theory and Applications. Vol. 50, n. 1, pp. 2-34. 2022.
M. Lodi, F. Bizzarri, D. Linaro, A. Oliveri, A. Brambilla, M. Storace. A Nonlinear Behavioral Ferrite-Core Inductance Model Able to Reproduce Thermal Transients in Switch-Mode Power Supplies. IEEE Transactions on Circuits and Systems I: Regular Papers. Vol. 67, n. 4, pp. 1255-1263, 2020.
M. Lodi, A. Oliveri. Online Estimation of the Current Ripple on a Saturating Ferrite-Core Inductor in a Boost Converter. Sensors. Vol. 20, n. 10, pp. 2921, 2020.
A. Oliveri, G. Di Capua, K. Stoyka, M. Lodi, M. Storace, N. Femia. A Power-Loss-Dependent Inductance Model for Ferrite-Core Power Inductors in Switch-Mode Power Supplies. IEEE Transactions on Circuits and Systems I: Regular Papers. Vol. 66, n. 6, pp. 2394-2402, 2019.
Modeling and compensation of rate-dependent hysteresis in piezoelectric actuators
Summary
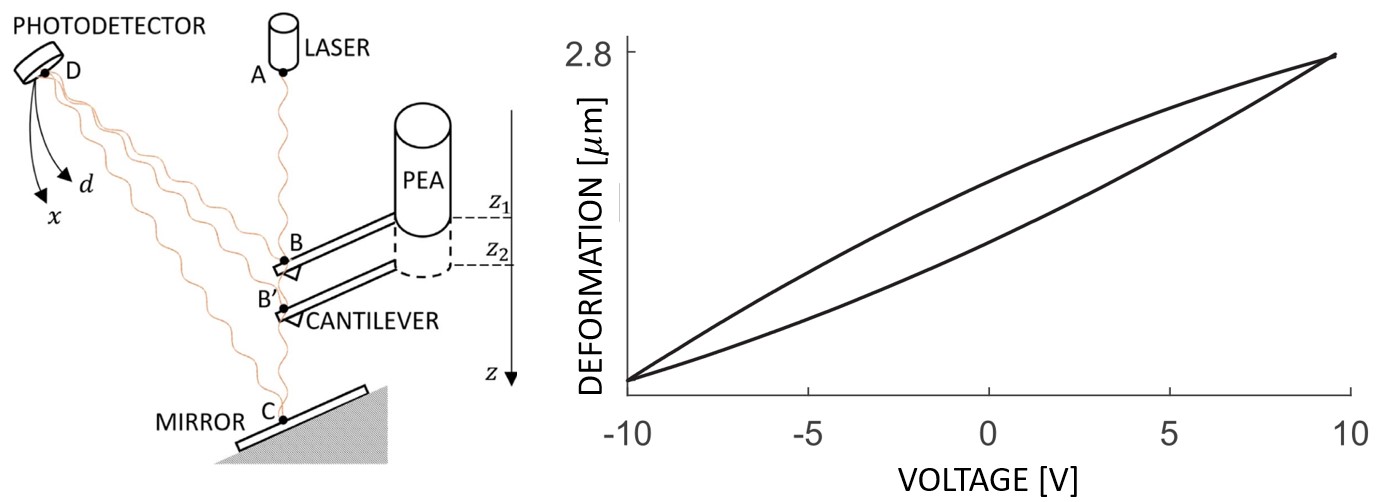
Atomic force microscopes (AFMs) are equipped with piezoelectric scanners, whose nanometric positioning accuracy is corrupted by hysteresis and creep.
These undesired behaviors decrease the positioning capabilities, causing distortions in the images from lateral scans and inaccuracies in the force-distance curves observed in force spectroscopy experiments.
Open-loop control techniques are an attractive choice to compensate for the nonlinearities of the piezoelectric actuator (PEA) embedded in the AFM, since they rely on models and do not need the online measurement of the PEA displacement.
To this aim, we proposed a generalization of the well-known Prandtl-Ishlinskii model, referred to as power-law model, able to compensate for both hysteresis and creep in PEAs. We also implemented an embedded compensator on microcontroller and successfully applied it for open-loop control of a PEA within an AFM.
Relevant publications
A. Oliveri, M. Lodi, M. Storace, R. Raiteri. Application of a low-cost piezoelectric displacement estimation technique based on laser interferometry for hysteresis open-loop compensation in an AFM scanner. Physica B: Condensed Matter. Vol. 549, pp. 43-46, 2018.
A. Oliveri, F. Stellino, M. Parodi, M. Storace. Hysteresis and creep: Comparison between a power-law model and Kuhnen's model. Physica B: Condensed Matter. Vol. 486, pp. 2-6, 2016.
A. Oliveri, F. Stellino, G. Caluori, M. Parodi, M. Storace. Open-Loop Compensation of Hysteresis and Creep Through a Power-Law Circuit Model. IEEE Transactions on Circuits and Systems I: Regular Papers. Vol. 63, n. 3, pp. 413-422, 2016.
M. Biggio, A. Oliveri, F. Stellino, M. Parodi, M. Storace. A Circuit Model of Hysteresis and Creep. IEEE Transactions on Circuits and Systems II: Express Briefs. Vol. 62, n. 5, pp. 501-505, 2015.